Shenzhen Dehong Vision Technology Co., Ltd.
Phone: 137 2892 0823
Fax: 0755-2372-6873
Email: 908450505@qq.com
Website: www.dhkj123.com
en.dhkj123.com
Address: Goldman Sachs Building, No. 18 Shajing
Center Road, Baoan District, Shenzhen
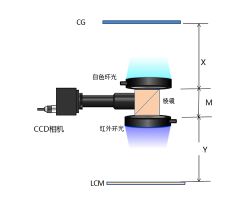
--Focusable lens
With the development of the automation industry, there are many types of machine vision software applications. How to choose a machine vision software that suits your needs?

1. MARK identification or positioning
The precise positioning of objects or features is an important function of a detection system or vision-guided motion system. Traditional object positioning uses gray value correlation to identify objects. Although this technique is widely used, it lacks stability when the image quality is deteriorated. The deterioration of image quality may be due to the effects of clutter, different brightness, and occlusion. In contrast, the geometric object localization method is a recent method that uses the outline of an object to identify the object and its features.
2. Industrial light source selection
It is well known that proper optics and lighting are critical to the success of vision applications. Sometimes, although the most suitable optical device and lighting are selected, if the monitored object or feature changes slightly, it is required to change the light and lighting brightness accordingly.
3. Complete tool set for multiple tools tied together
Machine vision software is mainly sold in two typical forms: one is a complete vision toolset, and the other is the application of tools for specific tasks, such as BGA inspection. The end-user application will decide whether to use a complete set of vision tools or many specific tools. A vision tool is a general application or algorithm that can perform a predetermined task on an image or a part of an image.
4. Easy programming and operation
Simple and intuitive graphical interface is the key to ease of use and setup. The main difference between today's machine vision products is their graphical interface. The interface should be evaluated in terms of "settings" and "operations". It should be very complicated for an engineer, but very simple for an operator.
5. Sub-pixel accuracy
The resolution of the visual system is the smallest feature that the system can distinguish. Choose high pixel CCD, high precision Dehong telecentric lens, and suitable industrial light source.
6. Future upgrades
Machine vision systems can be used in a variety of situations. Universal vision software can configure the appropriate light source, optical system and vision tools for end users. The machine vision image processing software independently developed by Dehong Technology Image is widely used. The machine vision image processing software provides multiple library functions such as image measurement, character recognition, color analysis, defect detection and target positioning. Users can use it to quickly develop image processing , Build your own machine vision application system.
The general purpose vision software system is better upgraded. End users should consider future system requirements based on additional cameras, Dehong telecentric lenses, changes in industrial light sources, and changes in vision tools.
7. Image preprocessing
It is very important to detect feature points and defects, regardless of brightness and object surface or material. The image preprocessing algorithm can enlarge the feature points of the image so that the visual tools can better detect them. Similarly, feature points can be scaled down so that visual tools can ignore them.
8. Visually guided movement
If your application requires a vision system to guide the robot, you must know how the vision system is integrated with the motion system. For calibration and operation, the unintegrated motion system and vision system are preliminary systems, and the robot or mechanism and the vision system are calibrated separately. In operation, an independent vision system can calculate the offset of the part position based on the known position in the visual coordinate system, and then send instructions to the robot's arm to pick up the part at the offset from the initial programmed pickup position .
9. System integration
The project requires a system integrator, and reasonable configuration will get the most suitable results.
10. Factory Level Connection
At present, there are various methods of communicating with the vision system, and common interfaces, such as serial port (RS-232), RS-485, parallel port, Ethernet, Devicenet, digital I / O, etc. Newer interfaces such as IEEE-1394 and USB are also widely used. When evaluating vision systems, consider the actual connectivity of the plant.

attention
Shenzhen Dehong Vision Technology Co., Ltd.
Phone: 137 2892 0823
Fax: 0755-2372-6873
Email: 908450505@qq.com
Website: en.dhkj123.com
Address: 19th Floor, Goldman Sachs Building,
No. 18 Shajing Center Road, Baoan District, Shenzhen
137 2892 0823
Service Hotline